Architecture Overview
Framework Modules
-
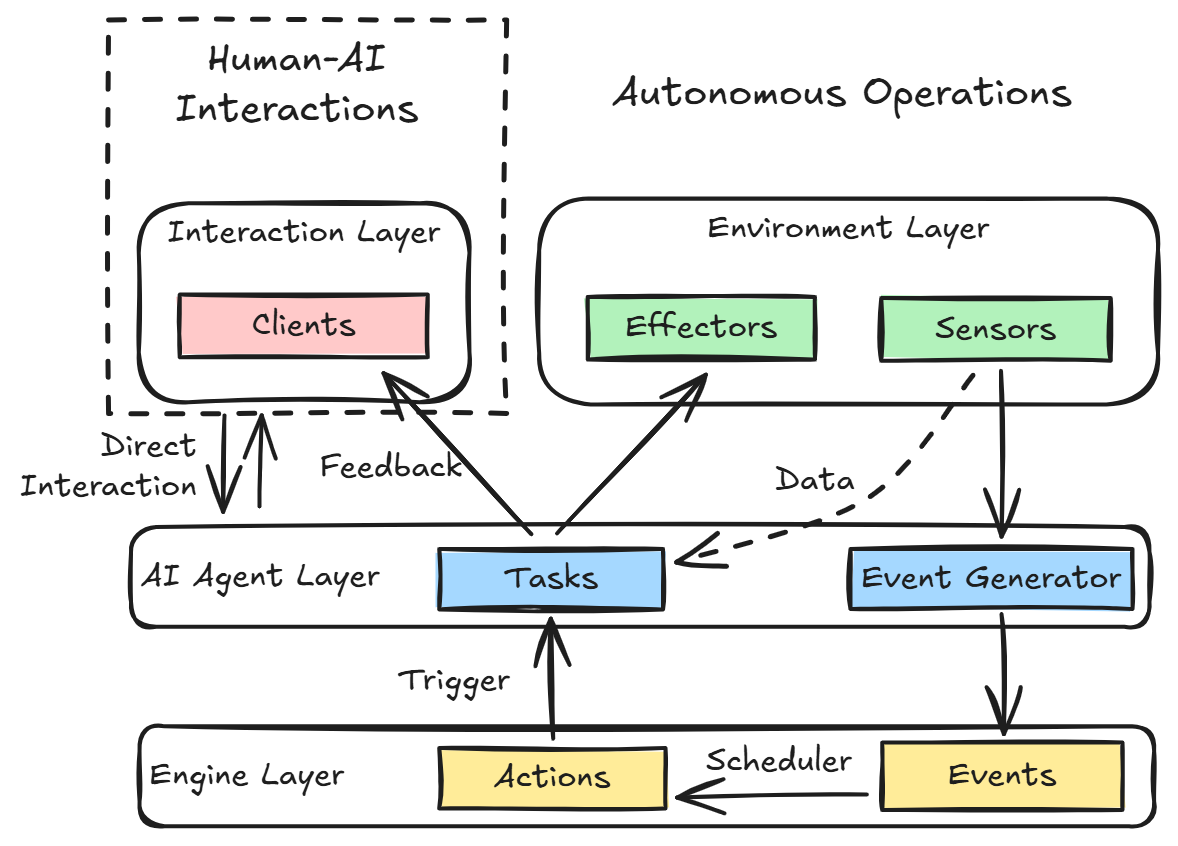
Framework Layers
- The Environment Layer is responsible for passively receiving and responding to changes in the environment (real-world or virtual, such as the Internet or blockchain) at all times, without requiring user or agent intervention.
- The Interaction Layer focuses on actively handling interactions initiated by users or agents, such as commands or state changes.Drivers for real-world hardware sensors and effectors are implemented in the
amico-firmwarecrate, enabling seamless integration with both physical and virtual environments. - The Agent Layer encapsulates the core logic of the agent, including state management, decision-making, and action execution. The concrete LLM Providers and RAG Systems are implemented in plugins. The framework provides several Task execution model (see the Model-Based Agents section below) implementations in the
amico-stdcrate, but you can also write your own implementations in plugins. - The Engine Layer implements the core logic of task scheduling, event generation and action selection based on events. The framework provides an implementation of Action Selector based on mapping in the
amico-stdcrate, but you can also write your own implementations in plugins.
-
Plugins
- Effectors: Perform actions like hardware module control, transaction execution, content posting, sending messages to other agents, etc.
- Sensors: Acquire the current state of the environment like sensor reading, social media content reading, receiving messages from other agents, etc.
- LLM Providers: Providing API access to LLM services like OpenAI, DeepSeek, etc.
-
Low-Level Plugins
- RAG Systems: Providing a retrieval-augmented generation system.
- Task Executors: Providing a task execution workflow, like Model-Based Agents described below.
- Action Selectors: Providing an action selection algorithm, to select the most appropriate action given the current state and the available actions.
- Firmware Drivers: Providing a low-level interface for interacting with embedded devices.
Model-Based Agents
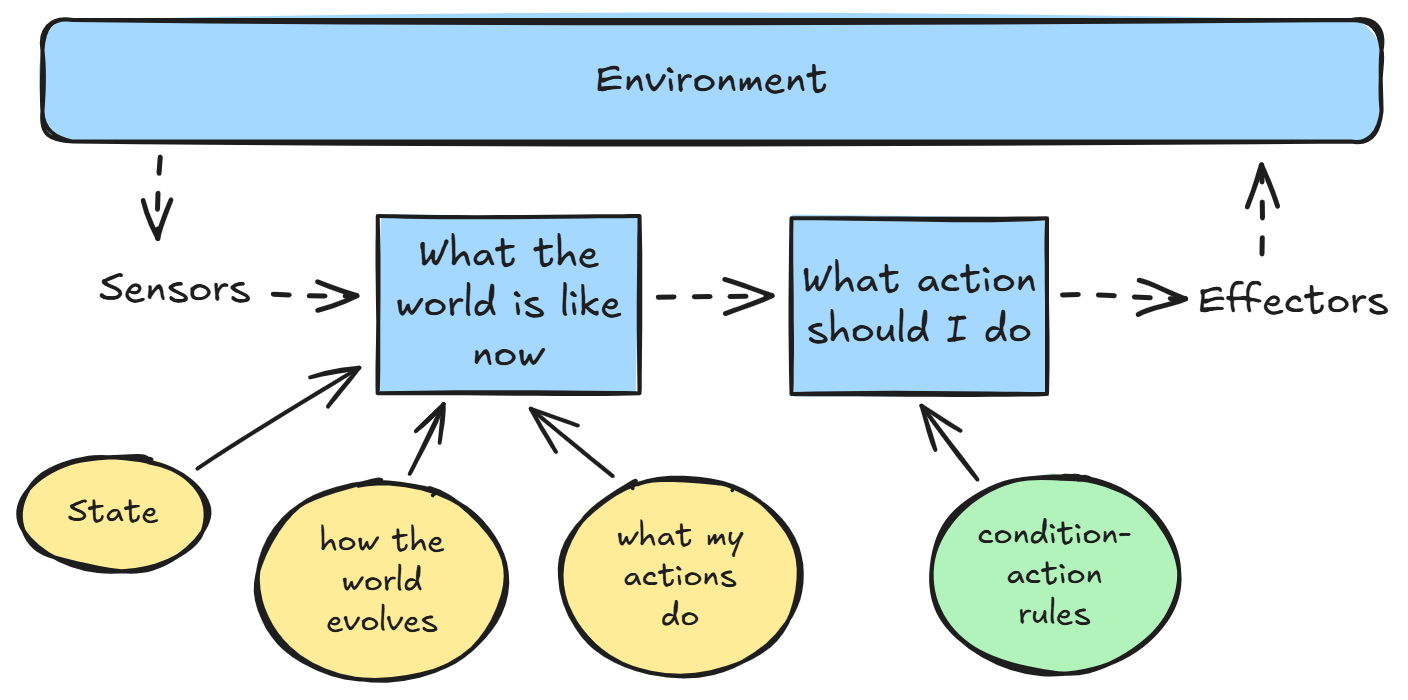
- State Representation: The state agent acquires the current state of the environment through sensors and represents it. This state describes the specific situation of the current world, such as the attributes of location, resources, or objects.
- World Evolution: Predicts the impact of actions.
- Condition-Action Rules: Module for decision-making.
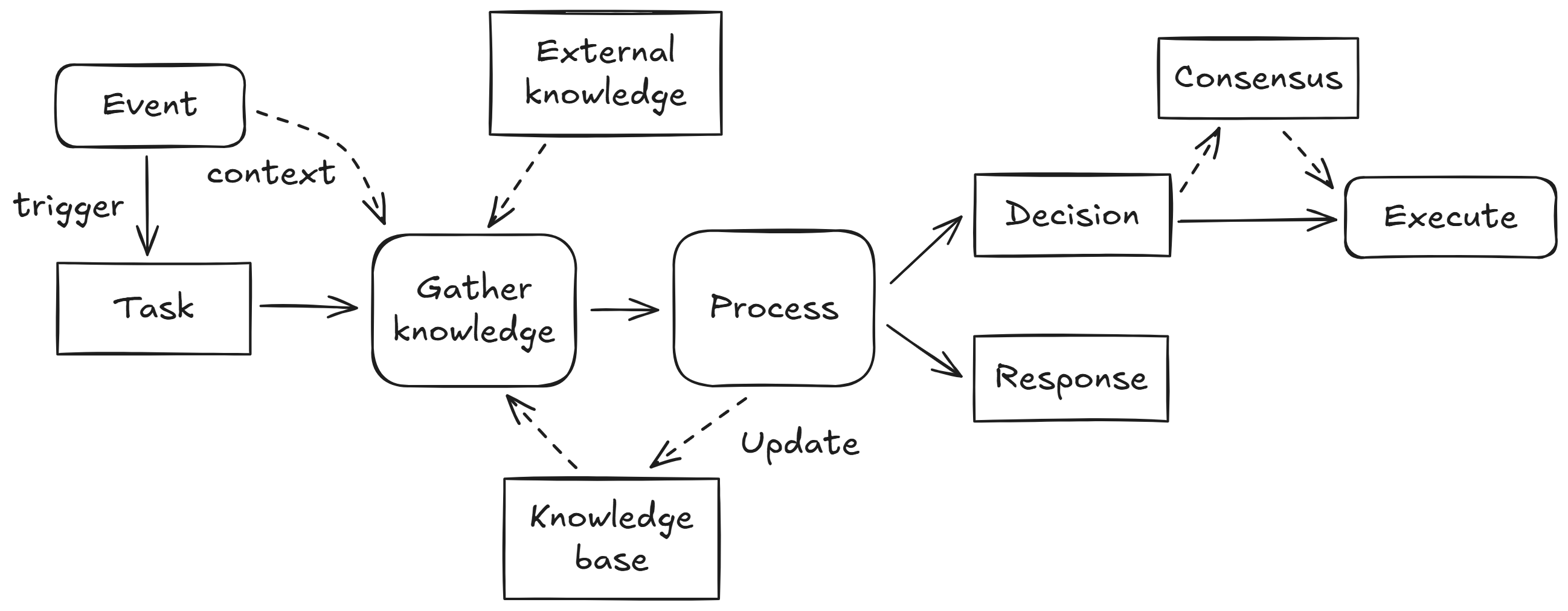
Task Execution Workflow
-
Event-Triggered Task
- Tasks are triggered by various "events", such as timers, major on-chain or off-chain events, or signals from other agents.
- Each event carries context, the information of the event in natural language, which is then used as an additional knowledge source when the agent gathers information.
-
Knowledge Acquisition
- The agent collects relevant knowledge from its internal knowledge base as well as the context of the event.
- If needed, the agent can also acquire real-time data sources from both on-chain and off-chain environments.
- The agent synthesizes all these informations into a comprehensive report to guide its decision-making process.
-
Decision Making
- Using the knowledge report, the agent evaluates possible actions and makes fully-informed decisions.
- The agent can either respond to the user, execute a task, or do both.
- For critical decisions, the agent may optionally seek consensus from other agents to ensure the reliability of the decision in a SWARM-system environment.
-
Execution of Decision
- The agent carries out the chosen action, which could range from executing a transaction to posting content (e.g., a tweet).
- If the action requires consensus, the agent will optinally first communicate with other agents before proceeding.
-
Agent Response
- Following execution, the agent can provide feedback to the user in human-readable way.
- This response could also include instructions (tool calls) for embedded devices, such as triggering a motor or adjusting the environment in some way.